 400 025 3599
400 025 3599 




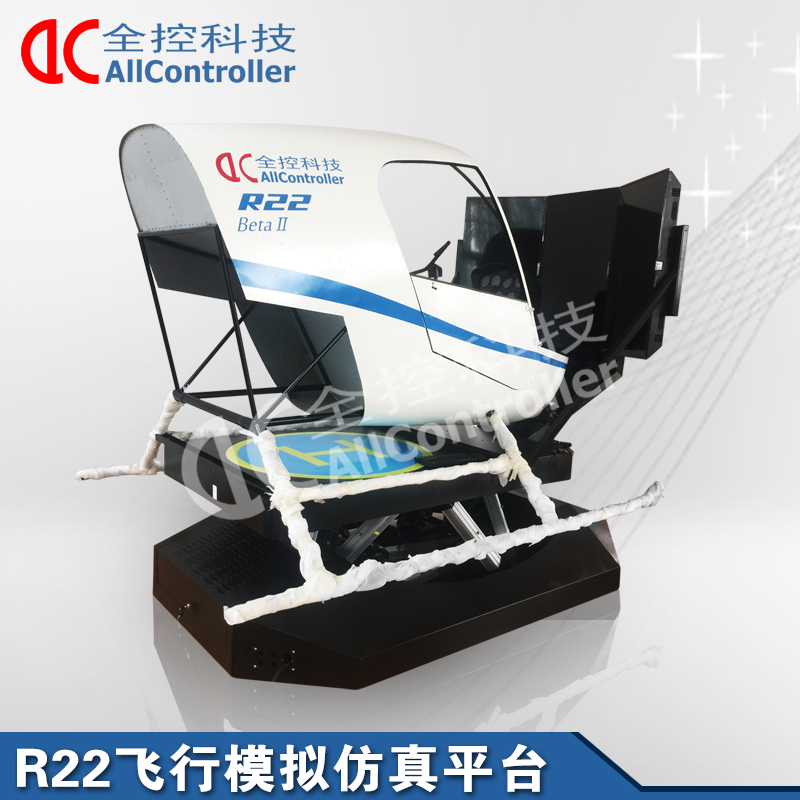
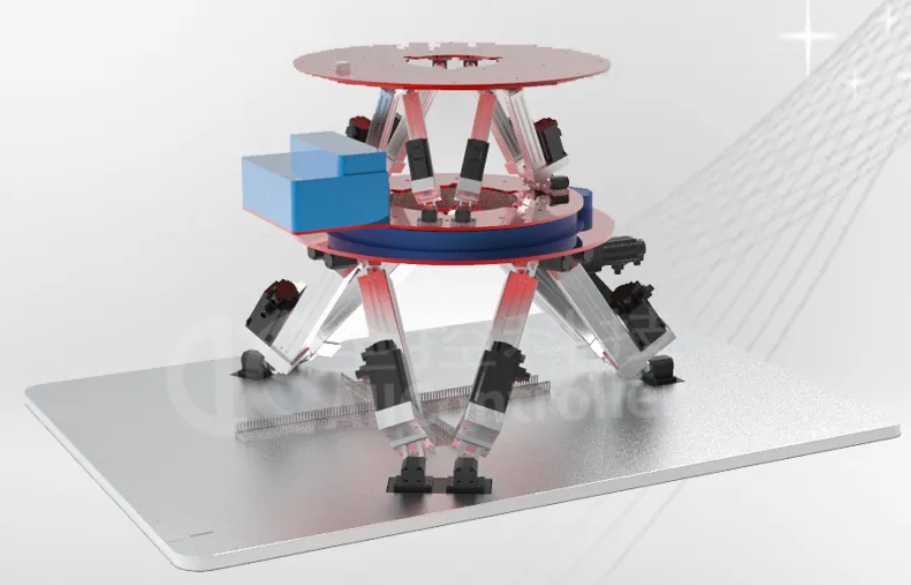
動感模擬仿真平臺由Stewart機構的多自由度運動平臺、計算機控制系統、驅動系統等組成。下平臺安裝在地面,用于固定基座,上平臺為支撐平臺。
計算機控制系統通過協調控制電動缸的行程和速度,實現運動平臺的多個自由度的運動,即笛卡爾坐標系內的三個平移運動和繞三個坐標軸的轉動。
各主要組成部分簡述如下:
1、動感平臺
上平臺:連接需要被模擬動作的機構,例如駕駛艙,座椅等。
上、下鉸接:此處安裝配件采用轉角較大的萬向節,上鉸接鏈接用于連接上平臺與電動缸的活塞桿,下鉸接用于連接固定基座與電動缸的筒體。電動缸的行程,速度,以及整個平臺的負載可以根據客戶的需求而定制。
下平臺:安裝固定基座。
2、計算機控制系統控制柜
平臺運動控制單元:采用含驅動器的伺服控制單元以及動作信號接收器,從而實現平臺系統啟動/停止。接收上位機發來的控制信息、對電動缸進行運動控制、監控伺服電機驅動器的工作狀態、監控系統的運動狀態、完成故障處理以及安全保護工作。
信號處理單元:完成與平臺系統運動狀態相關的各種傳感器信號、測試信號和數字I/O信號的處理,以及伺服驅動器的驅動等。
此處采用的一整套控制系統單元,我們一并提供。
3、系統控制軟件
運動控制計算機的軟件包括運動控制軟件和邏輯控制軟件,可以通過簡單的與電腦相連從而進行控制。
對于搭建娛樂所用的多自由度平臺,可以通過購買游戲(游戲軟件)的方式,捕捉游戲體驗者的動作,從而把動作信號發送到與電缸相連的控制器里,控制器通過控制驅動器,從而驅動電缸的伸縮,從而達到一個模擬的效果。
動感平臺將視、聽、力、觸覺等感覺進行自然交互,帶給人們驚險的刺激和逼真的體驗,而動感平臺運動控制系統是動感影院、游樂設備、舞臺、各種訓練模擬器等多類動感平臺不可缺少的重要設備。
動感平臺運動控制系統可廣泛用于動感影院、游樂設備、VR科技館、舞臺、噴泉、飛行模擬、艦艇模擬、坦克模擬、汽車駕駛模擬、地震模擬訓練、各種復雜環境測試等領域。
南京全控自主研發的動感平臺運動控制系統,采用全新的控制算法,實現了設備的多平臺、多自由度、高速度、高可靠的運行控制。




 在線咨詢
在線咨詢 




