 400 025 3599
400 025 3599 




目的:
在放射治療領域,能夠跟蹤患者運動或沿6自由度(6DOF)定位患者的醫療技術的使用穩步增長。但是,由于跟蹤和執行6DOF運動的復雜性,至關重要的是,必須正確驗證此類技術以使其在規格范圍內運行,以確保患者安全。在這項研究中,提出了一種機器人運動模型,可以對它進行編程,以沿X(左右),Y(上下),Z(前后),俯仰(大約X),橫滾(Y左右)和偏航(Z左右))軸。此外,可以執行沿所有軸的高度同步運動,以模擬6D腫瘤的動態運動。表征了這種6D運動的準確性和可重復性。
方法:
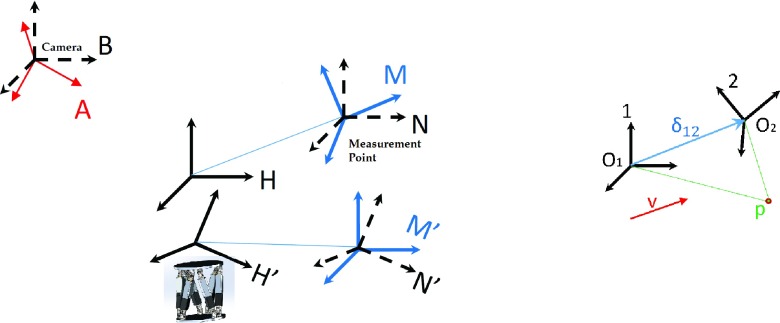
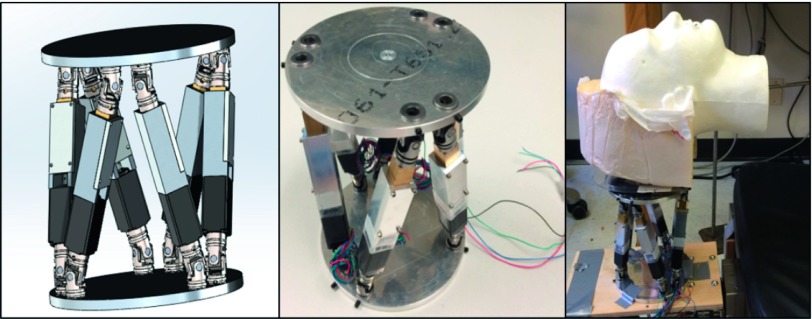
全控科技根據洗出算法以及并行運動學平臺原型,構建了內部設計和制造的6D機器人運動幻影。使用反向運動學公式控制該設備,并針對每個自由度同時或分別執行所有6個自由度(X,Y,Z,俯仰,橫搖和偏航)的精確運動。此外,有效地執行了先前記錄的6D顱骨和前列腺運動。使用15 fps 6D紅外標記跟蹤系統驗證了機器人的幻影運動,并將測得的軌跡與預期的輸入軌跡進行了定量比較。還確定了系統的工作空間,最大6D速度,齒隙和重量負載能力。
結果:
所述6DOF平臺的評價表明0.14平移根均方誤差(RMSE)值,0.22,和0.08毫米超過20毫米的X和ÿ和10毫米?分別和0.16旋轉RMSE值°,0.06°,和在俯仰,橫搖和偏航的10°上分別為0.08°。機器人平臺還有效地執行了受控的6D運動,并在15分鐘內再現了顱骨軌跡,平移和旋轉最大RMSE為0.04 mm,旋轉時的最大RMSE為2分鐘,平移時最大RMSE為0.06 mm旋轉0.04°。
結論:
在臨床標準下,這種6D機器人模型已被證明是準確的,并且能夠以6D模式再現腫瘤運動。這種功能使機器人模型可用于質量保證或研究目的。





 在線咨詢
在線咨詢 




