 400 025 3599
400 025 3599 




Stewart平臺(tái)英文名稱為Stewart Platform,最初由英國(guó)的 V. Eric Gough 于 1954 年設(shè)計(jì)。它被歸類為用于定位和運(yùn)動(dòng)控制的并聯(lián)機(jī)械手設(shè)備。它由兩個(gè)平行板和六個(gè)可調(diào)節(jié)腿組成,可精確調(diào)節(jié)和控制板。最初,該設(shè)備用于測(cè)試輪胎;后來(lái),斯圖爾特平臺(tái)開(kāi)始應(yīng)用于醫(yī)療行業(yè)、海洋研究、建筑行業(yè)、太空探索、航空航天、汽車和機(jī)械加工行業(yè)。它在提供具有高有效載荷的精確運(yùn)動(dòng)方面具有最佳用途,這對(duì)于飛行模擬器來(lái)說(shuō)是必不可少的。
Stewart 設(shè)備底部的板是設(shè)備唯一的靜態(tài)部分。該板最好借助螺栓固定在地板或其他表面上。它的六個(gè)腿將底板連接到移動(dòng)的頂板。為了提供充足的運(yùn)動(dòng)范圍,腿的兩端使用了不同類型的關(guān)節(jié)。通常每條腿都有一個(gè)圓柱形外殼,每條腿的長(zhǎng)度可以根據(jù)需要改變。這通常使用一種線性致動(dòng)器來(lái)處理。

圖 1 - Stewart 平臺(tái)的支腿通常具有圓柱形直線運(yùn)動(dòng)裝置(即直線執(zhí)行器)
由于其六足設(shè)計(jì),斯圖爾特平臺(tái)有時(shí)被稱為“六足”。該平臺(tái)也被歸類為并聯(lián)機(jī)械手,這意味著連桿(或腿)的末端執(zhí)行器(或“頂板”')通過(guò)不同數(shù)量(即六個(gè))獨(dú)立的連桿直接連接到底座,它們同時(shí)工作。
并聯(lián)機(jī)械手的控制更精確,因?yàn)檎`差不會(huì)隨著每個(gè)連桿而累積;相反,它是每條腿的誤差分布。
Stewart平臺(tái)是如何構(gòu)建的
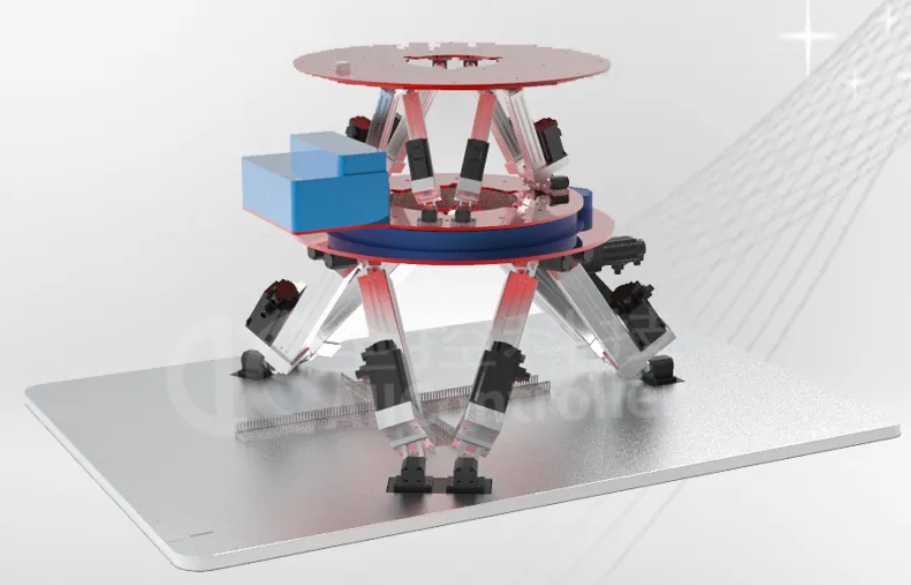
今天使用的斯圖爾特平臺(tái)機(jī)制與最初設(shè)計(jì)時(shí)略有不同。它由兩層組成:一層是固定的,一層是可移動(dòng)的,由六個(gè)可以改變長(zhǎng)度的腿相連。

圖 2 - Stewart 平臺(tái)的主要組件
通常液壓千斤頂或電動(dòng)線性執(zhí)行器用于“腿”。支腿可以固定在頂板上的三到六個(gè)安裝點(diǎn)上,同樣也可以固定在平臺(tái)的底板上。
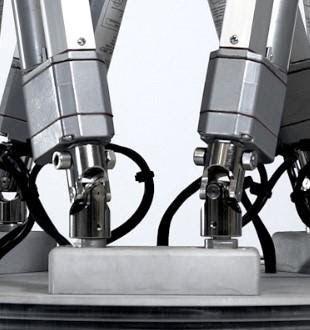
圖 3 – 有時(shí)腿可以配對(duì)并固定在 Stewart 平臺(tái)的底板上
固定這些腿的關(guān)節(jié)可以是萬(wàn)向節(jié)、磁性或針等。平臺(tái)的有效載荷和角旋轉(zhuǎn)能力很大程度上取決于腿和關(guān)節(jié)的類型。斯圖爾特平臺(tái)機(jī)構(gòu)設(shè)計(jì)為根據(jù)關(guān)節(jié)角度和腿長(zhǎng)在三個(gè)方向上進(jìn)行平移運(yùn)動(dòng)和三種方式的旋轉(zhuǎn)運(yùn)動(dòng)。
為了驅(qū)動(dòng)支腿并將平臺(tái)移向所需坐標(biāo),需要一個(gè)電力電子平臺(tái)和一個(gè)微處理器單元(即“控制器”)。控制器測(cè)量平臺(tái)的(實(shí)際)位置并計(jì)算將平臺(tái)移動(dòng)到其(新)所需坐標(biāo)所需的腿長(zhǎng)。控制器還負(fù)責(zé)向腿發(fā)送運(yùn)動(dòng)命令。這主要通過(guò)在控制器中運(yùn)行的基于數(shù)字 PI 或 PID 的控制算法來(lái)處理。電力電子級(jí)負(fù)責(zé)放大低功率控制器信號(hào)以“驅(qū)動(dòng)”執(zhí)行器。
Stewart平臺(tái)的用途有哪些
雖然并聯(lián)機(jī)器人用于機(jī)械領(lǐng)域,但它們也用于以下應(yīng)用:
工程研究應(yīng)用
用于空中、海上和陸地車輛的培訓(xùn)和娛樂(lè)模擬器
家庭娛樂(lè)系統(tǒng)
專業(yè)攝影
醫(yī)療和外科應(yīng)用
可穿戴設(shè)備(即智能手表、聽(tīng)力設(shè)備、智能手機(jī)等)測(cè)試
除了上訴用途以外,我們也應(yīng)用了一些其他有趣的行業(yè),比如5G遠(yuǎn)程駕駛、地震模擬器等,您可以在南京全控的應(yīng)用案例中查看:六自由度Stewart平臺(tái)應(yīng)用案例。




 在線咨詢
在線咨詢 




