 400 025 3599
400 025 3599 




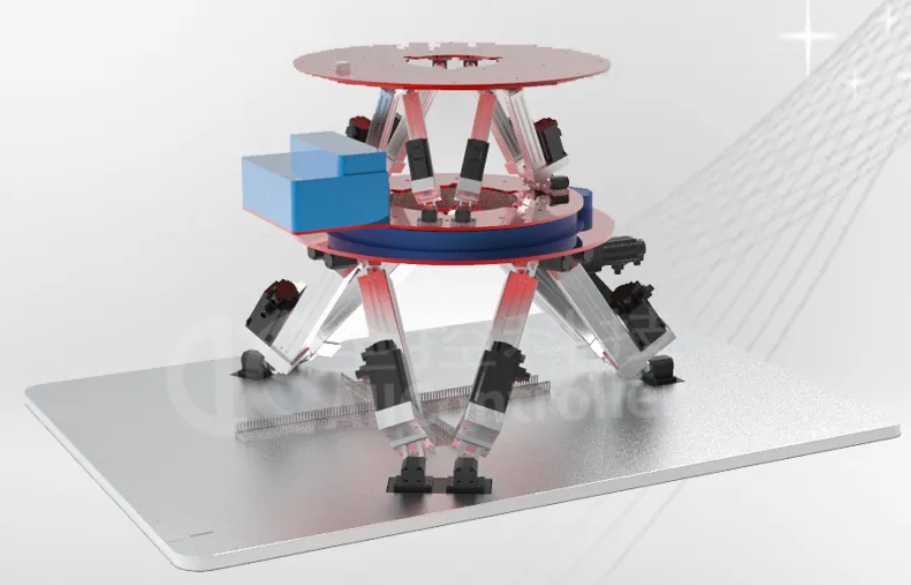
六自由度運動平臺是由六個伺服電機帶動電動缸做伸縮變化運動,六個電動缸并聯設置共同驅動運動平臺。運動平臺的每個電動缸都能夠實現空間中單獨的伸縮運動,因此控制系統通過對六個電動缸的伸縮量的控制,可以驅動上平臺完成空間中的六自由度運動,從而實現上平臺位姿的改變。六自由度分別指的是平臺沿著x、y、z三個坐標軸的平移運動,以及繞三個坐標軸的φx、φy、φz旋轉運動。
根據六自由度平臺的運動狀態,計算出各電動缸的相應位置和速度指令信號,從而控制運動平臺的動作,保證按照預定的軌跡運動;當運動平臺到達要求的位置時,各電動缸的速度指令信號給定為零,運動平臺就立刻停下來,達到了點位控制的目的。
1 位置解算算法
對于并聯機構的六自由度平臺在運動過程中,要保證運動的實時性和正確性,就需要通過對伸縮杠的精確控制來實現,這就需要引入六自由度平臺的實時位置正反解算法。所謂六自由度平臺的位置反解,是指由運動平臺的空間姿態求六個伸縮杠的伸縮量。而六自由度的位置正解,是指有六個伸縮杠的伸縮量來求運動平臺的空間姿態。
本次設計仍然采用位置反解的算法作為六自由度平臺的位置算法。經過推算后動平臺的各點坐標相對于靜平臺的各點坐標的方向轉換矩陣表示如下:

其中a,b,c對應為動平臺在X軸,Y軸,Z軸三個方向上的位移;對應為動平臺繞X軸,Y軸,Z軸三個軸旋轉的角度。
2 連續運動規劃
本設計將依次完成對YYPT平移、旋轉以及X-Y圓周運動三種運行曲線。
1、平移運動:動平臺不對X、Y、Z任一軸做旋轉,以平臺中心為控制點,在X、Y、Z任一軸向做往復軸向運動。
2、旋轉運動:以平臺中心位于X-Y平面的原點,并在Z軸行程中心,在X、Y、Z繞任一軸做角度旋轉的往復運動。
3、X-Y平面圓周運動:YYPT平臺在Z向行程為一半的X-Y平面上,以平臺中心為原點沿所規劃的圓形軌跡運動。其公式為
,其中X、Y分別為圓形在X、Y上的距離,r為所畫圓的半徑,按照此公式計算上平臺的運動軌跡。
3 控制策略
采用了位置環加驅動器內部的速度環、電流環相結合的三環反饋的控制方法。在控制算法中采用了前饋的算法,使控制效果更平穩、更精確。
4 控制軟件
軟件設計中采用了模塊化、面向對象的設計方法,將程序分為以下模塊:
1)六通道伺服控制模塊:在1ms伺服周期內,采集每個通道的反饋信號,將PID計算的信號對應通道輸出,并做必要的限位判斷。
2)六通道PID運算模塊:在1ms的伺服周期內,將反饋的信號和設置的信號進行PID運算,得出輸出信號量。
3)運動曲線規劃模塊:設置平臺按照規劃好的曲線方程進行運動。
4)六通道PID參數設置模塊:設置六支電動缸的PID參數。
5)數據采集及輸出模塊:采集編碼器的反饋數據并根據PID計算出的結果輸出相應的脈沖量。
5 軟件流程框圖




 在線咨詢
在線咨詢 




